Robots and their Arms
floor1
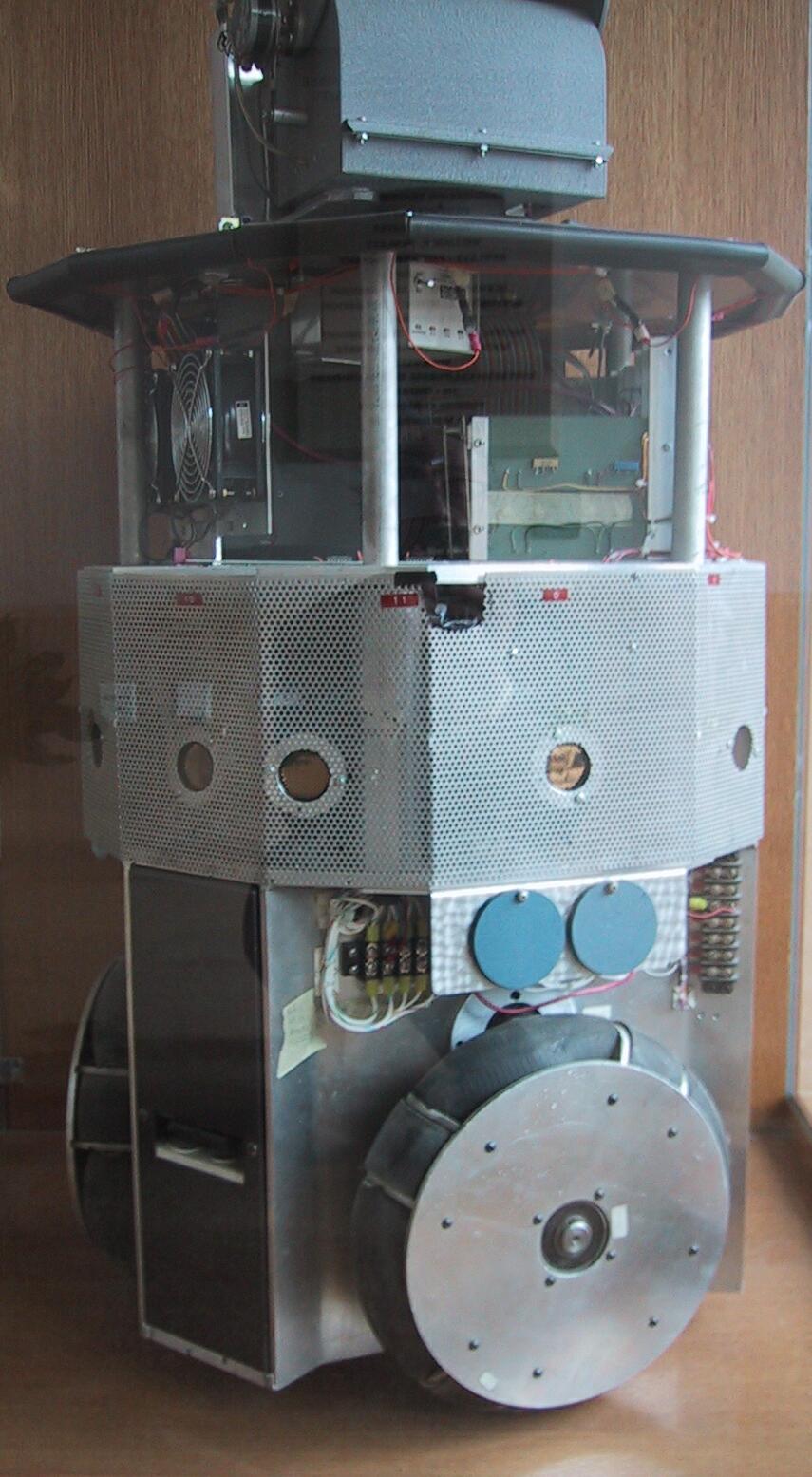
Mobie Robot, developed at Stanford.
The robot was used for mobility research, using vision and ultrasound
sensors.
More Mobi pictures.
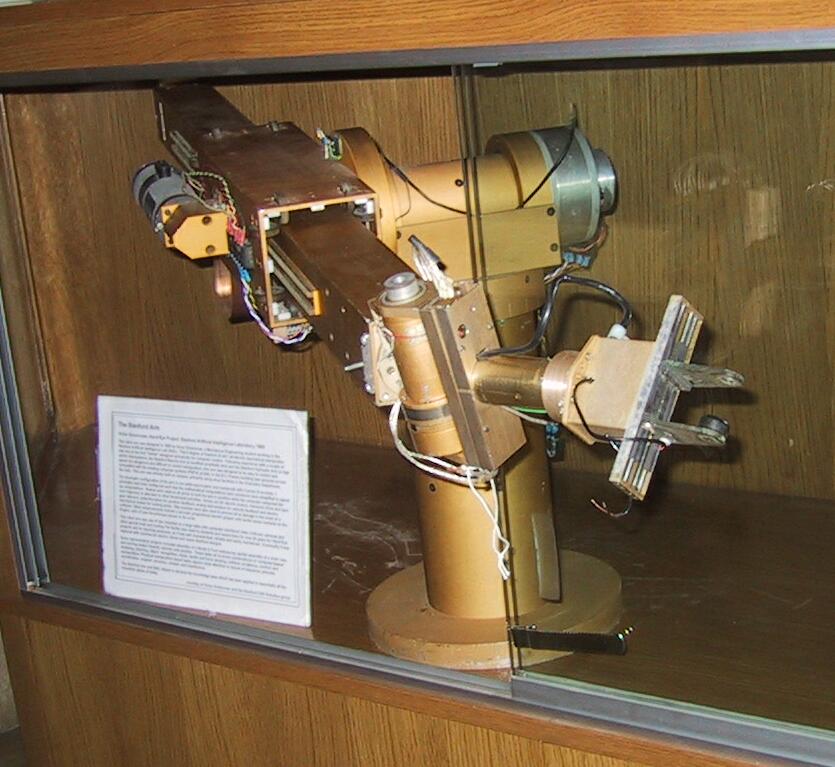
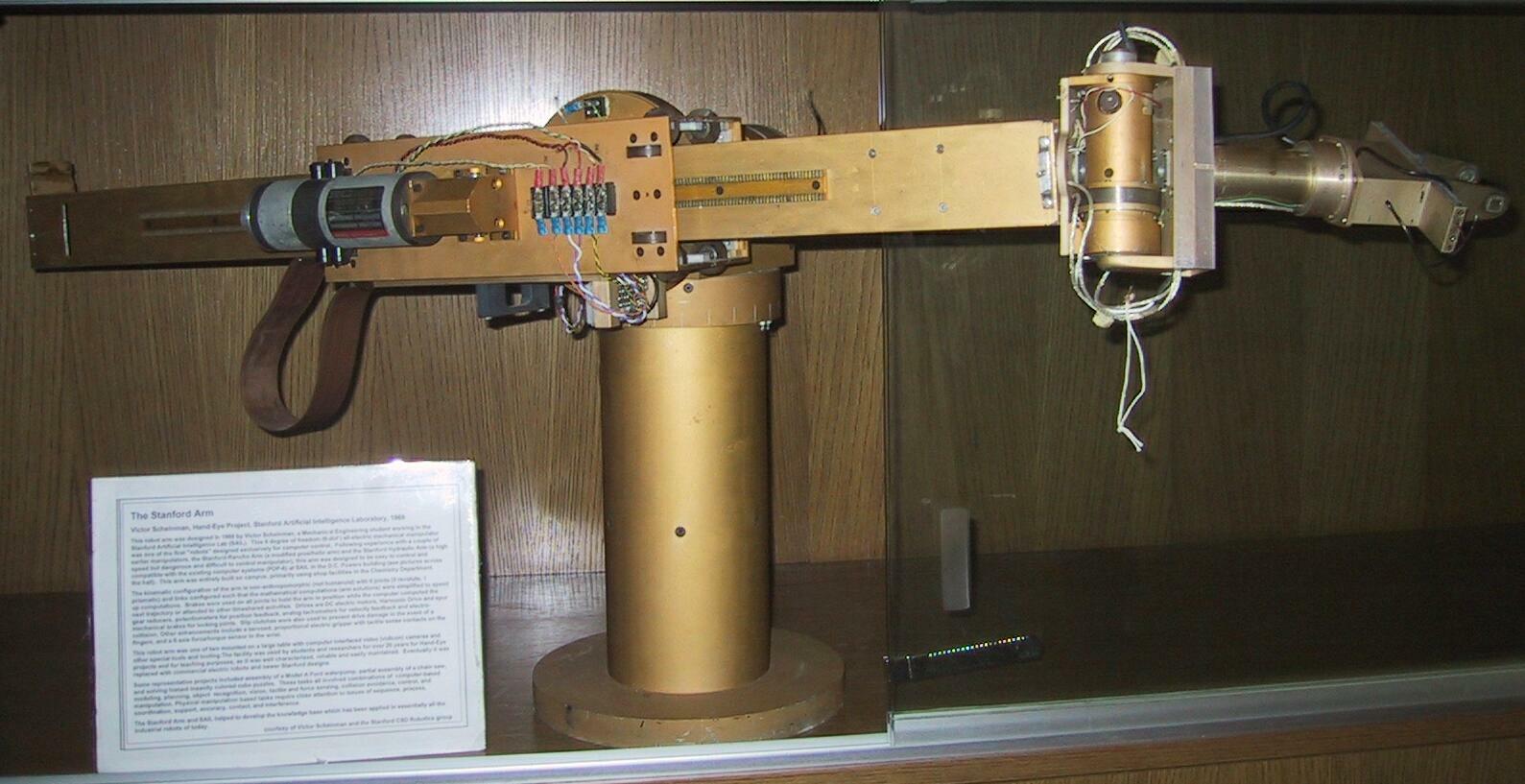
Stanford Arm - 1969
More Arm pictures.
Display Text
The Stanford Arm
Victor Scheinman, Hand-Eye Project,
Stanford Artificial Intelligence Laboratory, 1969
This robot arm was designed in 1969 by Victor Scheinman,
a Mechanical Engineering student working in the Stanford
Artificial Intelligence Lab (SAIL). This 6 degree of
freedom (6-dof) all-electric mechanical manipulator was
one of the first "robots" designed exclusively for
computer control. Following experience with a couple of
earlier manipulators, the Stanford-Rancho Arm (a modified
prosthetic arm) and the Stanford Hydraulic Arm (a high
speed but dangerous and difficult to control manipulator),
this arm was designed to be easy to control and compatible
with the existing computer systems (PDP-6) and the SAIL
facility. This arm was entirely built on campus,
primarily using shop facilities in the Chemistry Department.
The kinematic configuration of the arm is non-anthropomorphic
(not humanoid) with 6 joints (5 revolute, 1 prismatic)
and links configured such that the
mathematical computations (arm solutions) were simplified
to speed up computations. Brakes were used on all joints
to hold the arm in position while the computer computed
the next trajectory or attended to other timeshared
activities. Drives are DC electric motors, Harmonic Drive
and spur gear reducers, potentiometers for position
feedback, analog tachometers for velocity feedback and
electromechanical brakes for locking joints. Slip
clutches were also used to prevent drive damage in the
event of a collision. Other enhancements include a
servoed, proportional electric gripper with tactile sense
contacts on the fingers, and a 6 axis force/torque sensor in the wrist.
This robot arm was one of two mounted on a large table
with computer interfaced video (vidicon) cameras and other
special tools and tooling.The facility was used by
students and researchers for over 20 years for Hand-Eye
projects and for teaching purposes, as it was well
characterized, reliable and easily maintained. Eventually
it was augmented with commercial electric robots and newer
Stanford designs, but the Blue arm, nearly identical is
still in occasional use in the Robotics laboratory on this floor.
Some representative projects included assembly of a Model
A Ford waterpump, partial assembly of a chain saw and
solving Instant Insanity colored cube puzzles. These
tasks all involved combinations of computer based
modeling, planning, object recognition, vision, tactile
and force sensing, collision avoidance, control and
manipulation. Physical manipulation based tasks require
close attention to issues of sequence, process,
coordination, support, accuracy, contact and interference.
The Stanford Arm and SAIL helped to develop the
knowledge base which has been applied in essentially all
the industrial robots of today.
courtesy of Victor Scheinman and the Stanford CSD Robotics group
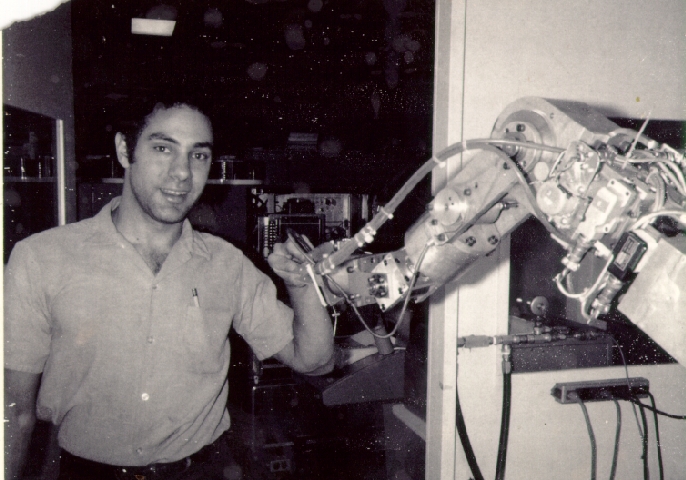
We are also displaying now a smaller robot arm designed by Victor
Scheinman and used at MIT. Its mechanism presages the large
industrial robots, as the PUMA.
A dynamic web site is in
Paderborn,
Germany; sponsored by Nixdorf Computers.
(English
version)






{kind=link}
{kind=link}
{kind=link}

{kind=link}
![Historical Photograph of Stanford Robot Arm [Designed by Victor Scheinman, photo taken around 1970 by Les Earnest, scanned by Bruce Baumgart]](robots/StanfordArm.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}